Faculty:
- PhD Xosé R. Fdez-Vidal
- PhD Xosé M. Pardo
Staff:
Post Doctoral Researchers:
- Raquel Dosil Lago (PhD 2005), now at Gradiant.
- Antón García (PhD 2011), now at AIMEN.
- Victor Leborán (PhD 2016), now at CITIUS.
Graduate Students:
Research Collaboration:
- Roberto Iglesias Rodríguez, Collaboration on artificial vision applied to mobile robotics. University of Santiago de Compostela (USC).
- Fernando López García, Collaboration on Scene Recognition. Polytechnic University of Valencia (UPV).
Research Projects:
Research at GVA covers a wide range of subjects in the areas of computer vision, image processing, machine learning and robotics. Below are some descriptions of on-going or past projects. Please check the publications page too, because we do not have a web page for some old projects.
Open Research Topics
Bottom-up Visual Attention: Saliency
Here, we are interested in visual attention, a mechanism in the animals brain which selects the saliency parts of the scene and guides our gaze. In this field, we proposed several novel computational models: 1) Adaptative Whitening Saliency (AWS), 2) Weighted Maximum Phase Alignment (WMAP) and 3) Dynamic Whitening Saliency (AWS-D).
- Team: Xosé R. Fdez-Vidal, Xosé M. Pardo, Antón García, Víctor Leborán
Completed Projects
Scene Recognition using Visual Attention for robot navigation
The scene recognition task is related with the recognition of general scenarios rather than local objects. In our case, we study how we can use our novel model of spatial saliency (visual attention) combined with image features to significantly accelerate a scene recognition application and, at the same time, preserve the recognition performance. To do so, we use a mobile robot-like application where scene recognition is carried out through the use of image features to characterize the different scenarios, and the Nearest Neighbor rule to carry out the classification. SIFT and SURF are two recent and competitive alternatives to image featuring that we compare here through extensive experimental work. Results from the experiments show that SIFT features perform significantly better than SURF features achieving important reductions in the size of the database of prototypes without significant losses in recognition performance, and thus, accelerating scene recognition.
- Team: Fernando López, Antón Garcia, Xosé M. Pardo, Xosé R. Fdez-Vidal
Vision Systems for Social Robotics
To achieve an efficient use of the robots, it is interesting to know the tasks that each one of them is able to solve, so that some visual-agents can observe the environment, identify those situations where a robot is useful, and thus require its presence.Thus, it will appear as the robot has got initiative. Also, the identification of familiar locations (offices, conference rooms or corridors) while the robot is navigating in an environment would allow the retrieval of already learnt controllers. These functionalities require tracking people, object and scene recogniton, gesture and action recognition,and so on.
- Team: Xosé M. Pardo, Xosé R. Fdez-Vidal, Víctor Álvarez-Santos, Roberto Iglesias
Dimensional Metrology
This research line is a very applied work (R+D+i), that pretends development of techniques and methodologies of metrology of high rank for the development of innovative solutions applied to the wind power, railway, aeronautical and naval sectors. In this work, GVA has two main objectives:
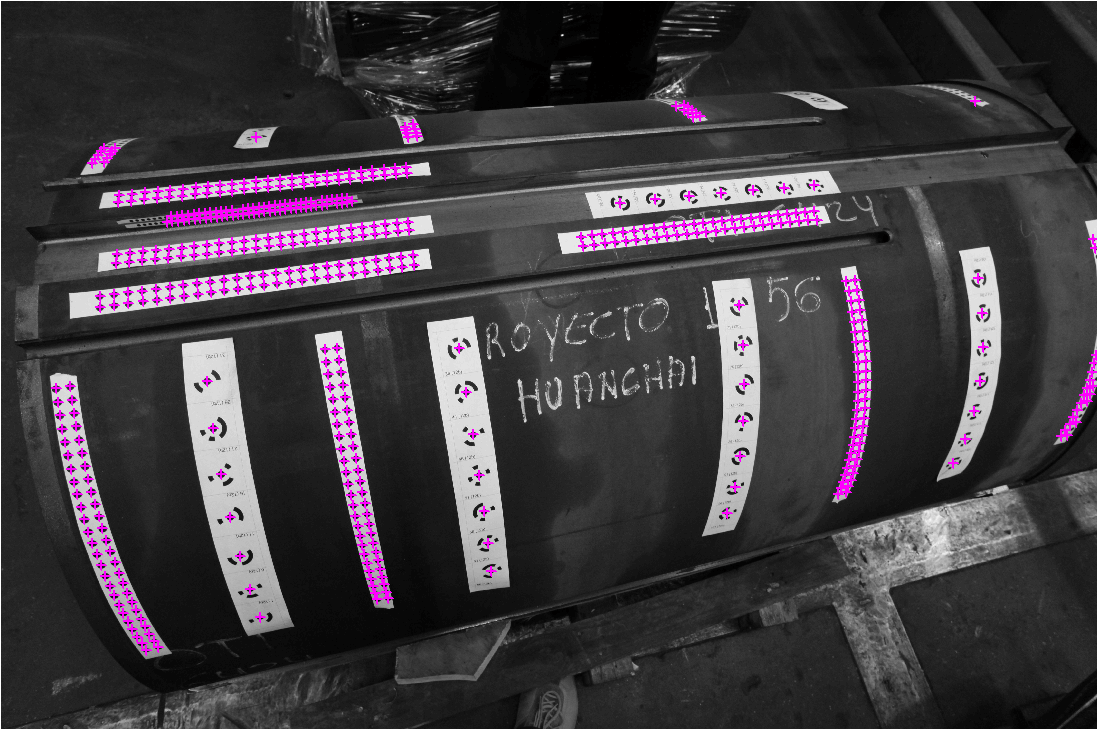
- Detect, recognize and seek correspondences from coded circular markers.
- Detect, identify and seek correspondences from natural markers of the pieces.
- Team: María Fuciños, Juan López, Xosé M. Pardo, Xosé R. Fdez-Vidal
Motion Segmentation using Composite Frequency Features

Here, we propose a non-causal method for the detection and segmentation of motion patterns from video sequences, based on the use of composite frequency features to guide active model segmentation. In particular, we have applied our method for data-driven synthesis of composite-feature detectors to extract the most relevant spatio-temporal visual patterns. Such composite-features are a combination of log-Gabor band-pass features, tuned to different scales and orientations. The particular recombination log-Gabor features for a specific image is inferred from the input data by cluster analysis based on a criteria on alignment between energy maxima ...
- Team: Raquel Dosil, Xosé M. Pardo, Xosé R. Fdez-Vidal
3D Composite-Feature Detectors
Methodology for data-driven synthesis of composite feature-detectors using a decomposition-integration strategy. The image is decomposed into a set of elementary frequency features. To obtain composite features, simple features are integrated by means of unsupervised clustering. The criterion for binding is based on the concept of Phase Congruence and is reflected using image dissimilarity measures.
- Team: Raquel Dosil, Xosé M. Pardo, Xosé R. Fdez-Vidal
Medical Image Analysis
We have been involved int the reconstruction of anatomical organs in images from different modalities. Frequently, 3D image data sets have no isotropic spatial resolution; voxel size is bigger along the longitudinal axis in order to maintain as low a radiation dose as possible, to increase the ratio number-of-scanned-patients/time, etc. When this happens, features cannot be extracted in 3D, and therefore a slice-to-slice framework is more adequate. In most general case, organs are complex structures and, as a consequence, their boundaries are rarely well defined by single features. We have chiefly devoted to the development of active contour model estrategies to cope with these problems.
- Scientific Results and Funding
- Team: Raquel Dosil, Xosé M. Pardo, D. Cabello